Project has been started by 2 students
LEGENDARY ROVER TEAM
See what make us successful!
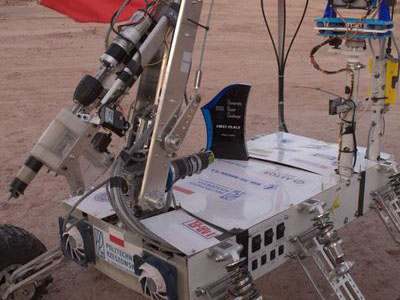
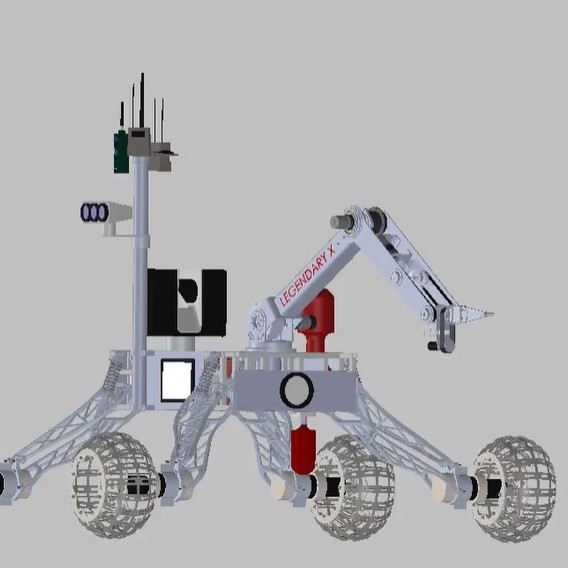
Manipulator
High precise control of rover manipulator without using inverse dynamics.

3D printing
Various component made using 3D printing technology.
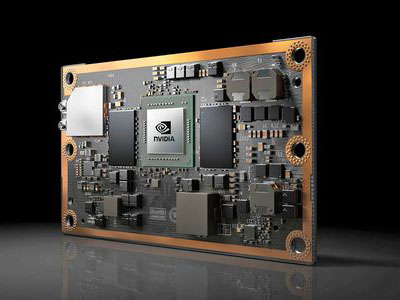
AI with NVIDIA
NVIDIA Jetson TX2 delivers speed and power-efficiency in an embedded AI computing device.

Chassis
Aluminium chassis ensure low weight and durability.
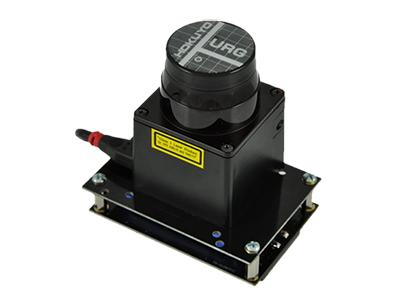
Computer Vision
Four color cameras guarantee 360 degree view, view stability and high image quality. Lidar provides high-accuracy distance measurement in surroundings.
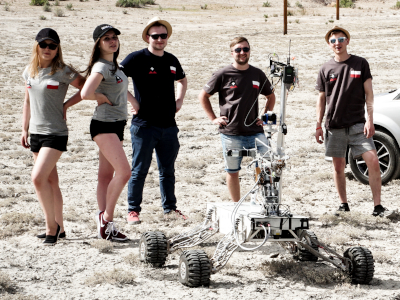
Teamwork
What make us successful is teamwork, ambitions and enthusiasm for work.
Story & Awards
2013
Our Humble Beginnings
2014
3rd place on URC
Legendary Rover II won 3. prize on University Rover Challenge with a score of 338 points

2015
1st place on URC
Legendary Rover III won first prize on University Rover Challenge with a score of 459.8 points!

2016
1st place on URC
Legendary Rover III won first prize on University Rover Challenge with a score of 452.3 points!

2017
1st place on Pro Defence
Competition organized by the Polish Space Agency, our rover won first place

2018
3rd place on Sumo Challenge
Legendary Rover after exciting fights won 3rd place in Sumo Challenge in Łódź

2020
IV place on Robotic Arena in Wrocławiu
Legendary Rover won 4th place in the Robotic Arena in the freestyle category

2021
2nd place at the IRDC
Legendary Rover won II at the IRDC organized by Mars Society South Asia
2021
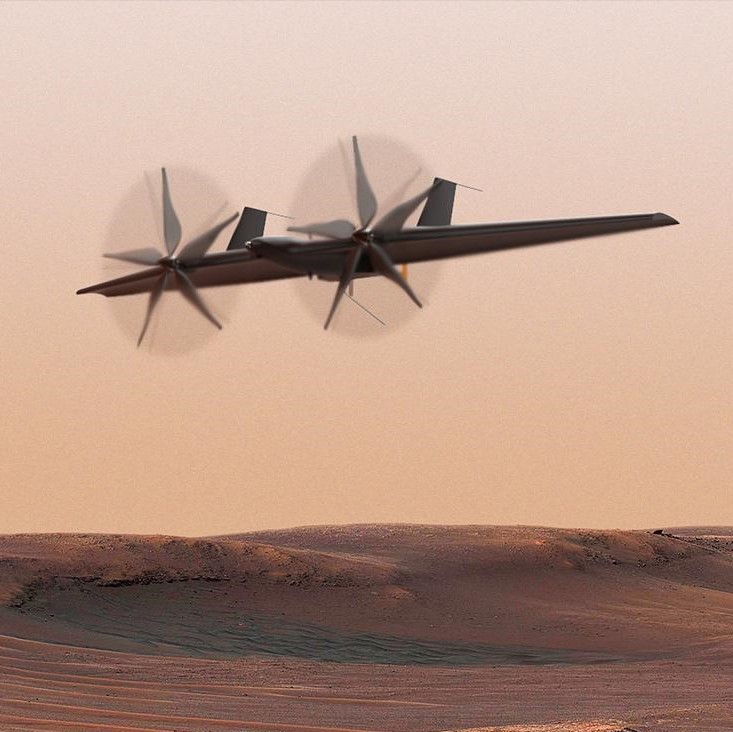
1st place for IPAS
We took first place in the International Planetary Aerial Systems Challenge
Be part
of out
success!
of out
success!
Our amazing team

Miłosz Bar
CEO
Managers
Michał Radawiec
Vice-chairman

Łukasz Bańczyk
Secretary

Michał Bazan
Treasurer

Patrycja Charkot
Marketing Leader

Paweł Marszałek
Main Project Manager

Karol Bona
Finance Leader
Michał Bazan
Electronics Leader
Bartłomiej Gajewski
Mechanics Leader
Patrycja Nabel
Science Leader
Our amazing team

Our sponsors




Contact form
Created by  Ⓒ2019
Ⓒ2019
Ⓒ2019